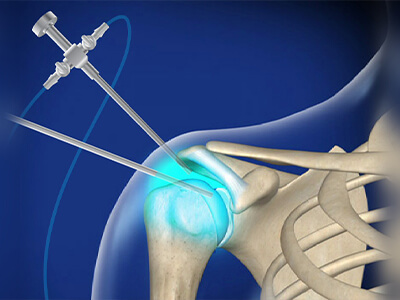
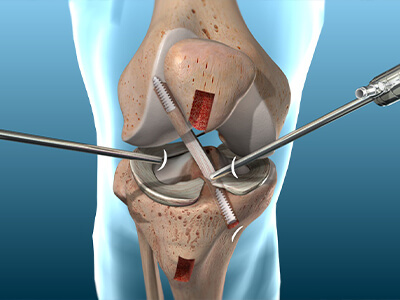
Η συνηθέστερη βλάβη μετά από ένα εξάρθρημα είναι η βλάβη Bankart (αποκόλληση του επιχειλίου χόνδρου) και η βλάβηHill-Sachs (αποκόλληση οστέινου τμήματος από τη κεφαλή του βραχιονίου) . Στο 2ο εξάρθρημα οι βλάβες γίνονται πιο έντονες, με μεγαλύτερη οστική απώλεια τόσο από τη πλευρά της ωμογλήνης όσο και από τη κεφαλή του βραχιονίου. Σ αυτές προστίθεται και η χαλάρωση των συνδέσμων με ένα νέο εξάρθρημα. Έτσι, συνεχίζεται ο φαύλος κύκλος της αστάθειας με το χαρακτηριστικό στοιχείο, ο ασθενής να περιγράφει ότι, ο ώμος εύκολα πλέον εξαρθρώνεται αλλά και εύκολα ανατάσσεται. Προληπτικά, από τη στιγμή που κλινικά πλέον είναι αντιληπτό το επαπειλούμενο εξάρθρημα, (apprehensiontest +) θα πρέπει να γίνεται η αρθροσκοπική αποκάσταση των βλαβών, με τη προυπόθεση ότι, οι οστικές βλάβες δεν είναι μεγάλες. Σ αυτές τις περιπτώσεις πρέπει να εφαρμόζουμε και οστικό μόσχευμα.